|
SimulationChain
|
|
SimulationChain
|
SimulationChain allows simulation of complex discrite dynamic systems. Key features implemented comprises of ARX object model, PID and GPC controllers and identification algorithm. Application has been created as a programming assignment for Control Systems Programming laboratory (abr. PSS).
Many of its functions are covered in WymaganiaProgr2014.pdf document available for all students enrolled on PSS course. A brief description of its main technical features:
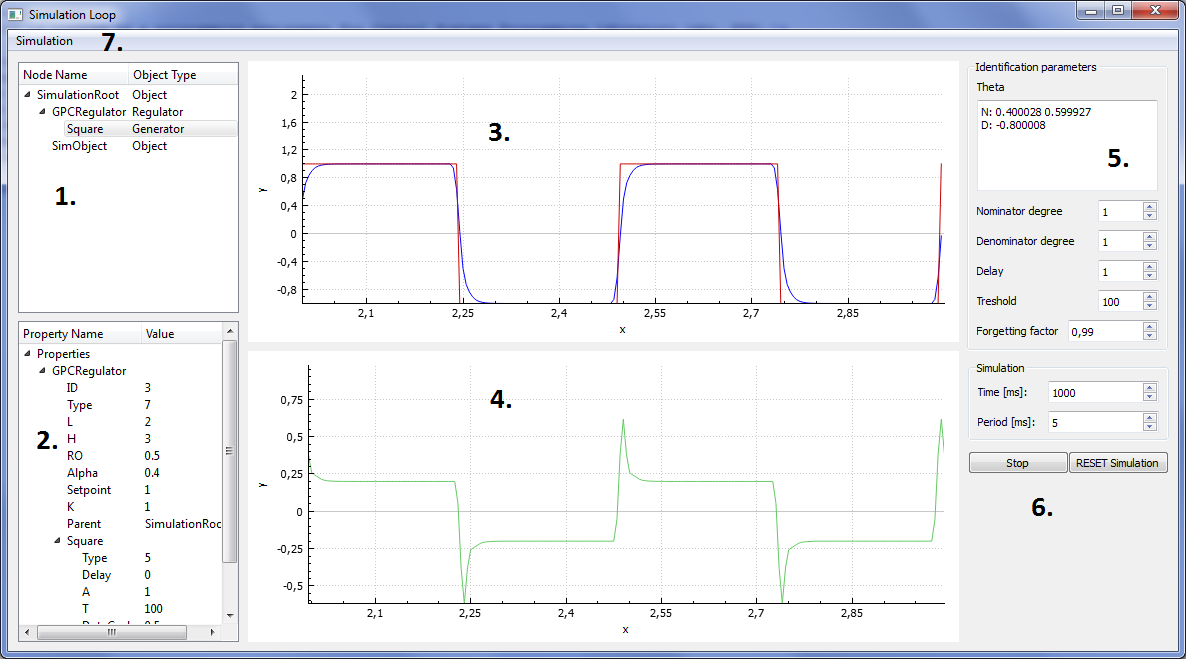
There is a main window shown in the picture below.
Features:
There is unified naming convention used throught the project. The main rules are:
The project is divided into three main parts:
Adding a new generator will require deriving from abstract base class CRegulator and adding its type to the GenType enum and registering in the corresponding factory. Similar procedure is used in case of simulation chain classes which has to derive from CSimNode or any of the inherited classes.
All simulation chain and generator objects are using SUniqueNameController to register unique names which come in handy when searching through the simualation tree.
SLogic will be initialized from contructor. When using standard console output the program will be run from the SLogic::Run method. When using GUI it will have to connected to required functions.
Program uses following, external libraries: - QT GUI and multithreading libraries, - Eigen-Eigen matrix and vector manipulation library, - Boost library. To compile, it is necessary to use a compiler which will handle C++11 features. Recommended compilers for Windows OS are: - MinGW v0.6.2 beta, - Visual Studio 2013 compiler. Both have been tested and proved to deliver sufficient support for the C++11 standard.
The application was created by Aleksander Bulski and Jacek Turula (identification algorithm), students of Automatic Control and Robotics at the Silesian University of Technology, faculty of Automatic Control, Electronics and Computer Science, spring semester 2013/2014.
 1.8.7
1.8.7 
